Smart Factory 関連お取り扱い製品


■ Web アプリケーションで簡単設定
Web アプリ上で誰でも簡単にマッピング作業やプログラム作成を行うこと ができます。レイアウト変更なども保守サービスを介することなく修正可能 なので、頻繁に環境が変化する現場でもお使いいただけます。
■ 用途に合わせて柔軟なカスタマイズが可能
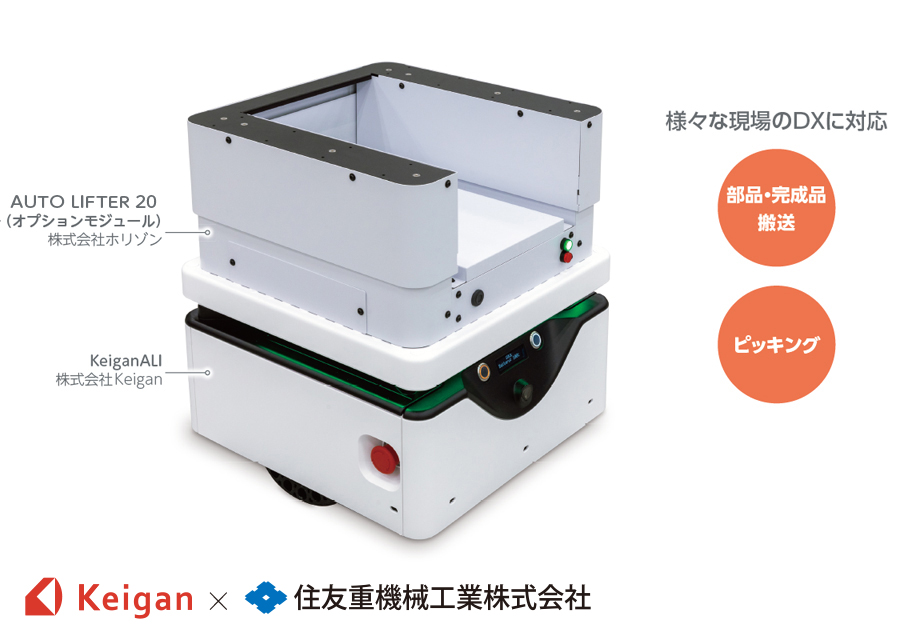
プラ成型部品などの軽量物のバケット運搬、倉庫内ピッキング作業後のソー ト済み物品運搬、飲食店での自動配膳など、カスタマイズ次第でさまざまな シーンでご活用いただけます。ホリゾンではオプションモジュールのほか、 ワークの積み下ろしを自動化するストックコンベアの設計・ご提案も行って います。
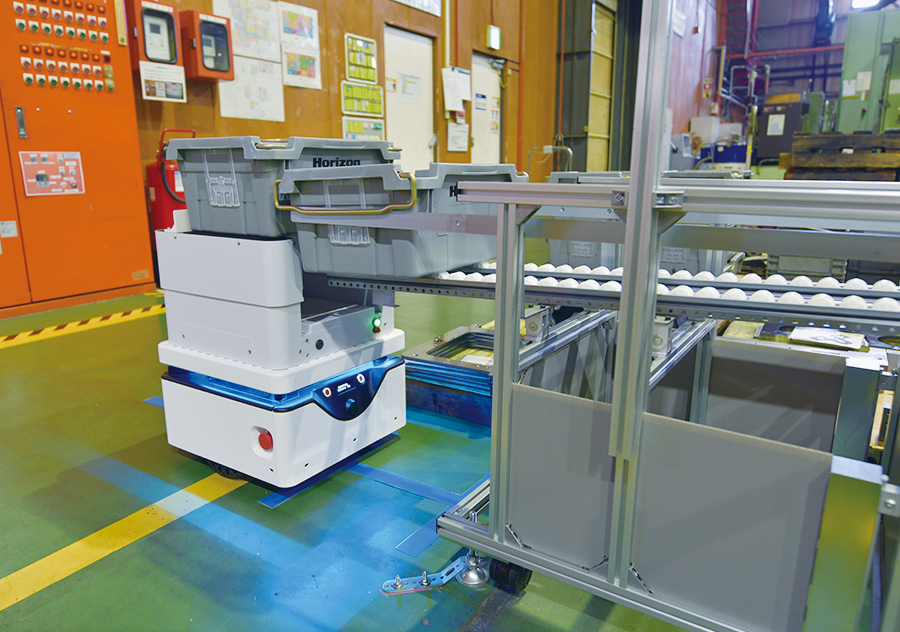
■ ホリゾンでは部品加工工場の工程間搬送を自動化
KeiganALI の上部に自社製アタッチメントのリフター※を取り付け、 GPIO 連携でリフターの昇降指示をKeiganALI から送ることで、部品 の引き渡しと受け取りを自動で行っています。小ロットかつ高頻度 な搬送作業を自動化することで、リードタイムの短縮に繋がっています。 ※リフターアタッチメント単体のご購入も可能です。



| Model | KeiganALI |
|---|---|
| 機械寸法 | 幅450 × 奥行450 × 高さ300 mm |
| 質量 | 27.5 kg(バッテリー込み) |
| 搬送質量 | 30 kg (オプションモジュール重量含まず) |
| 最大速度※ | 0.5 m/s (1.8 km/h) ライントレース使用時:0.25 m/s(0.9 km/h) |
| 搬送質量に対する段差乗上能力※ | 30 kgまで5 mm、10 kgまで10 mm |
| 登坂能力※ | 1.1° |
| 停止位置精度※ | ±75 mm ライントレース使用時:繰り返し精度20 mm 以内(個体差あり) |
| MAP推奨最大サイズ | MAPの推奨最大サイズは100 m × 100 mです。 それ以上でご使用される際は問い合わせをお願いいたします。 |
| 製造 | 株式会社Keigan |
| Model | AUTO LIFTER 20(オプションモジュール) | |
|---|---|---|
| ワーク:リフトテーブルサイズ | 幅420 × 奥行420 mm (中央に幅270 mmの切り欠き有) オプション取り付けにより拡張可 | |
| 昇降部 | ストローク | 100 mm(地上高 500~600の範囲) |
| 昇降速度 | 10 mm/s(平均値) 例:下端から50 mmまで昇降させた場合:4秒 50 mm位置から、上端まで昇降させた場合:6秒 100 mmフルストロークさせた場合:10秒 |
|
| 機能 | KeiganALI 本体のGPIO 出力でリフト動作、 KeiganALI 本体への動作フィードバック(動作完了、エラー) 在荷センサによるワークの有無の検知が可能 |
|
| 電源 | DC24 V 1.8A (KeiganALI より供給) | |
| 機械寸法 | KeiganALI含む:幅450 × 奥行450 × 高さ500 mm AUTO LIFTER 20単体:幅440 × 奥行425 × 高さ200 mm |
|
| 可搬質量 | 20 kg 以下 | |
| 質量 | KeiganALI 含む:37.5 kg、AUTO LIFTER 20 単体:10 kg | |
| 製造 | 株式会社ホリゾン | |